
2次元平面における直線のベクトルを使った出し方
平面ベクトル(教科書範囲) ★★
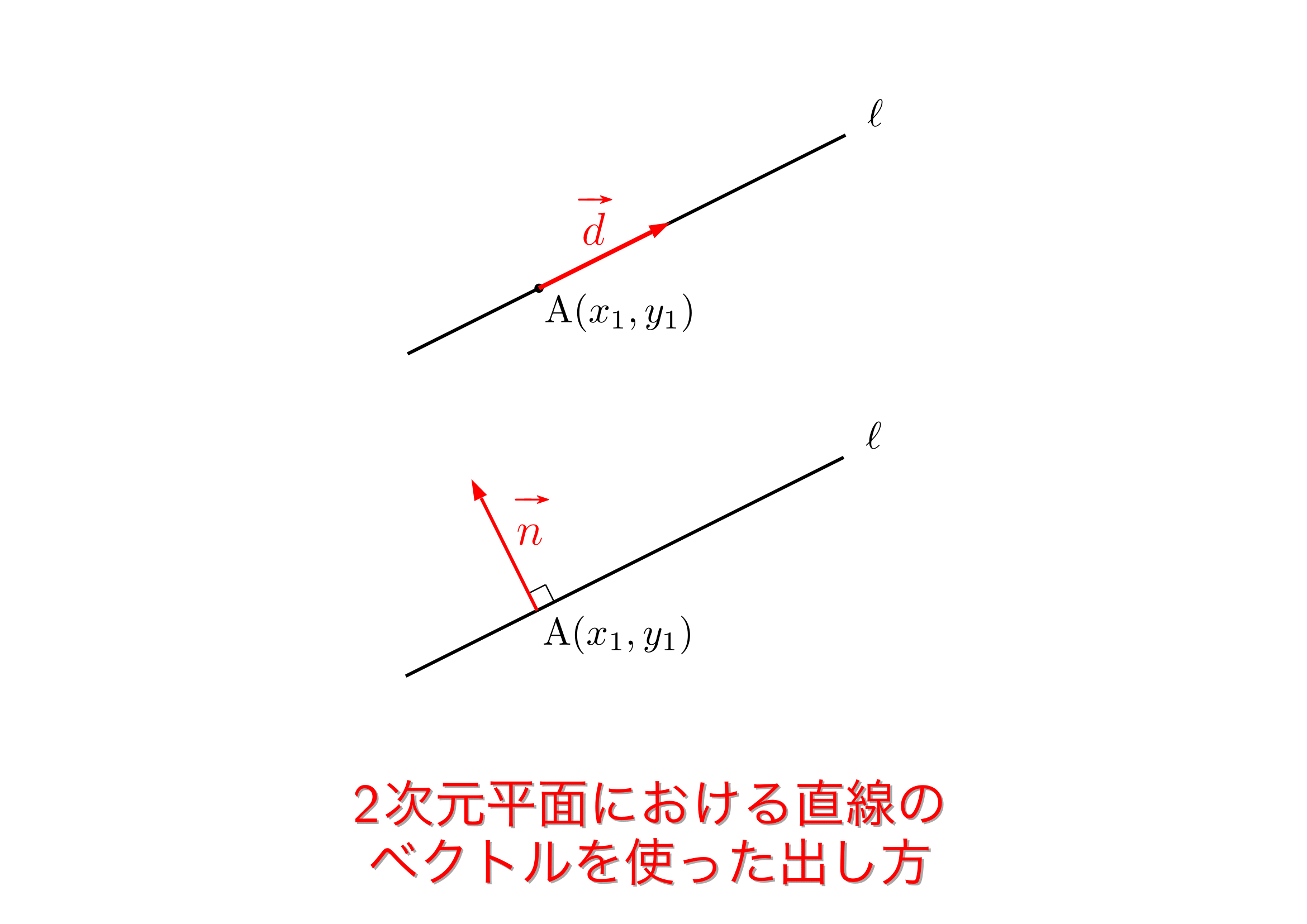
2次元平面内の直線の方程式について整理し,ベクトルを使った出し方を解説します.
2次元平面における直線の方程式まとめ
2次元平面における直線の方程式
Ⅰ $y=ax+b$ (1次関数)
メリット:傾きと切片がすぐわかる.方向ベクトルがすぐわかる.グラフを書きやすい.求めやすい.
Ⅱ $ax+by+c=0$ (一般形)
メリット:法線ベクトルがすぐわかる( $\overrightarrow{\mathstrut n}=\begin{pmatrix}a \\ b \end{pmatrix}$).すべての直線を表現可能.点と直線の距離が使える.
それぞれに上のようにメリットがあるので,適切に使い分けるようにできるのが肝要です.
Ⅱでは法線ベクトル (normal vector)が $\overrightarrow{\mathstrut n}=\begin{pmatrix}a \\ b \end{pmatrix}$とすぐわかるのが大きいです.なぜこうなるかは $ax+by+c=0 \Longleftrightarrow y=-\dfrac{a}{b}x+\dfrac{c}{b}$ として,方向ベクトル(direction vector)が $\overrightarrow{\mathstrut d}=\begin{pmatrix}b \\ -a \end{pmatrix}$ とわかるので,これに垂直なものの1つは $\overrightarrow{\mathstrut n}=\begin{pmatrix}a \\ b \end{pmatrix}$ なはずです.
2次元平面における直線のベクトルを使った出し方
以下,2つの方法があります.方向ベクトル,法線ベクトル,わかっている方から出します.
方向ベクトルから出す方法は空間も同じです(ベクトル方程式が同じです).
2次元平面における直線(方向ベクトルから出す)
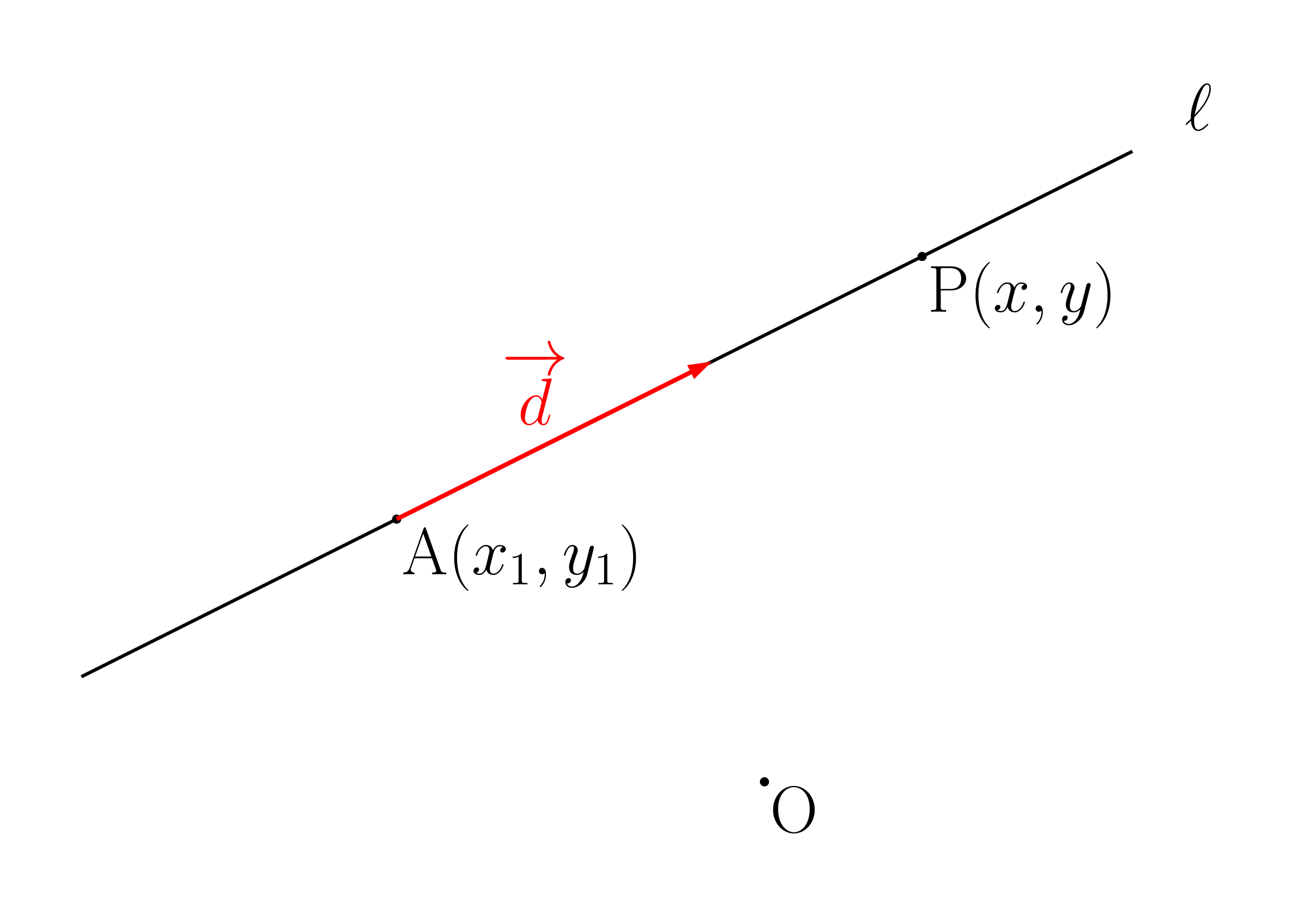
${\rm A}(x_{1},y_{1})$ を通り,$\overrightarrow{\mathstrut d}=\begin{pmatrix}l \\ m \end{pmatrix}$ に平行な直線 $\ell$ は
$\overrightarrow{\mathstrut \rm OP}=\overrightarrow{\mathstrut \rm OA}+\overrightarrow{\mathstrut \rm AP}$
$\Longleftrightarrow \overrightarrow{\mathstrut p}=\overrightarrow{\mathstrut a}+t\overrightarrow{\mathstrut d}$
$\Longleftrightarrow \begin{pmatrix}x \\ y \end{pmatrix}=\begin{pmatrix}x_{1} \\ y_{1} \end{pmatrix}+t\begin{pmatrix}l \\ m \end{pmatrix}$
$\Longleftrightarrow \ $$\begin{cases}\boldsymbol{x=x_{1}+lt} \\ \boldsymbol{y=y_{1}+mt} \end{cases}$ ←媒介変数表示
↓ $t$ 消去
$\boldsymbol{\color{red}{\dfrac{x-x_{1}}{l}=\dfrac{y-y_{1}}{m}}}$
特に上の赤い式を暗記しておくと便利です.
続いて法線ベクトルから出します.
2次元平面における直線(法線ベクトルから出す)
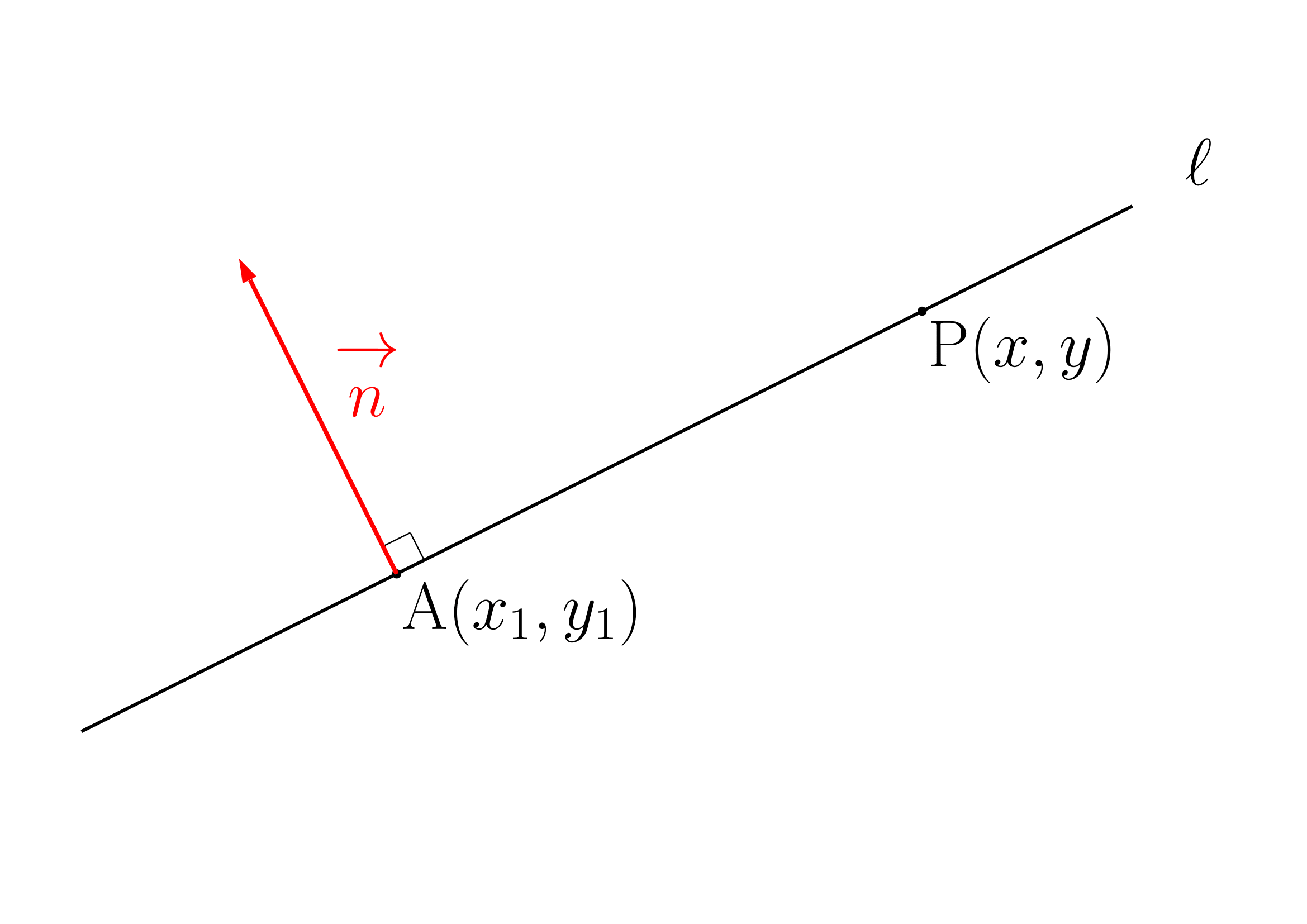
${\rm A}(x_{1},y_{1})$ を通り,$\overrightarrow{\mathstrut n}=\begin{pmatrix}a \\ b \end{pmatrix}$ に垂直な直線 $\ell$ は
$\overrightarrow{\mathstrut n} \cdot \overrightarrow{\mathstrut \rm AP}=0$
$\Longleftrightarrow \overrightarrow{\mathstrut n}\cdot(\overrightarrow{\mathstrut p}-\overrightarrow{\mathstrut a})=0$
$\Longleftrightarrow \begin{pmatrix}a \\ b \end{pmatrix}\cdot\begin{pmatrix}x-x_{1} \\ y-y_{1} \end{pmatrix}=0$
$\therefore \ \boldsymbol{\color{red}{a(x-x_{1})+b(y-y_{1})=0}}$
こちらも最後の赤い式を暗記しておくと楽です.
練習問題
練習
(1) $\rm A$$(1,-2)$ を通り,$\overrightarrow{\mathstrut d}=(3,2)$ に平行な直線の方程式を求めよ.
(2) $\rm A$$(3,1)$ を通り,$\overrightarrow{\mathstrut n}=(-5,2)$ に垂直な直線の方程式を求めよ.
練習の解答
(1)
$\dfrac{x-1}{3}=\dfrac{y-(-2)}{2}$
$\Longleftrightarrow 2(x-1)=3(y+2)$
$\Longleftrightarrow \boldsymbol{2x-3y-8=0}$
(2)
$-5(x-3)+2(y-1)=0$
$\Longleftrightarrow \boldsymbol{5x-2y-13=0}$